top of page


legged-based AGV for grasping the ping-pong balls
This project was done by me and my team members who are from Paraguay. In the end of that semester we need compete the racing for how many ping-pong balls we can grasp in five minutes

01
The competition for grasping ping-pong balls
In this project, I am in charge of control system and mechanism design .
.png)
02
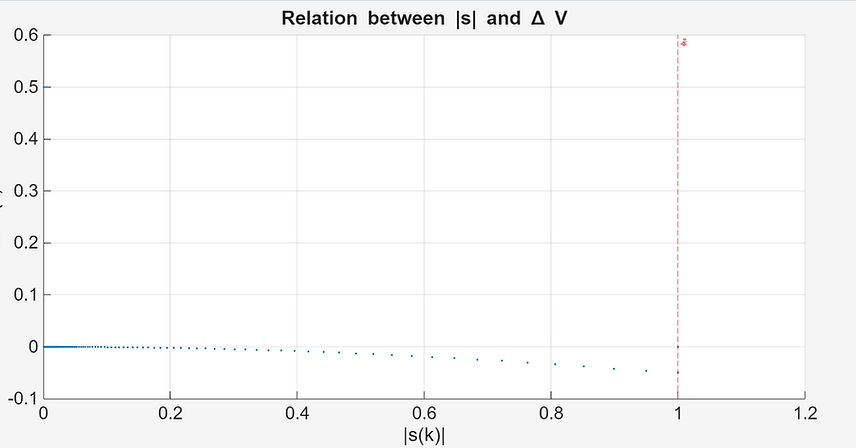
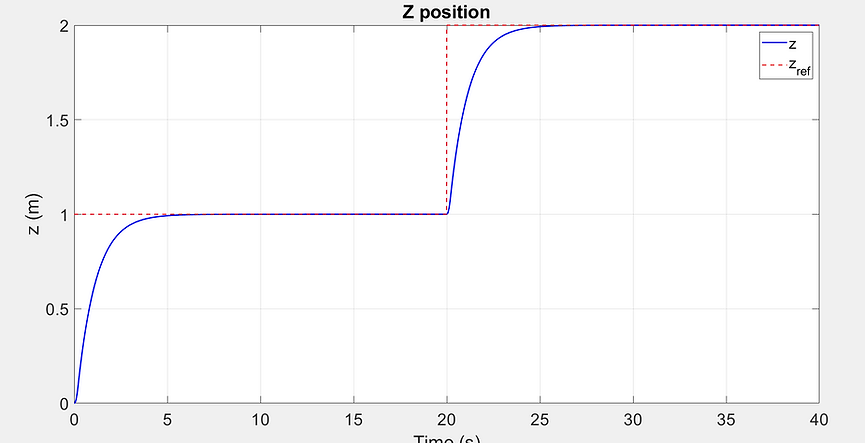
The state estimation for quadrotor UAV with matlab
In this project, what I am focused on is trying to control a non-linear underactuated system for quadrotor UAV with Lyapunov direct method.
bottom of page